Reactor模型
Reactor的基本概述
上述的Reactor模型可以演变出很多种类型,但是这里我们主要研究两种Reactor模型,即:基础的Reactor以及Reactor与线程池结合的版本。那么我们先从基本的Reactor来研究,探究其中的原理,然后使用面向对象的设计思想将其实现出来。
先来回顾一下基本的Reactor模型的原理图
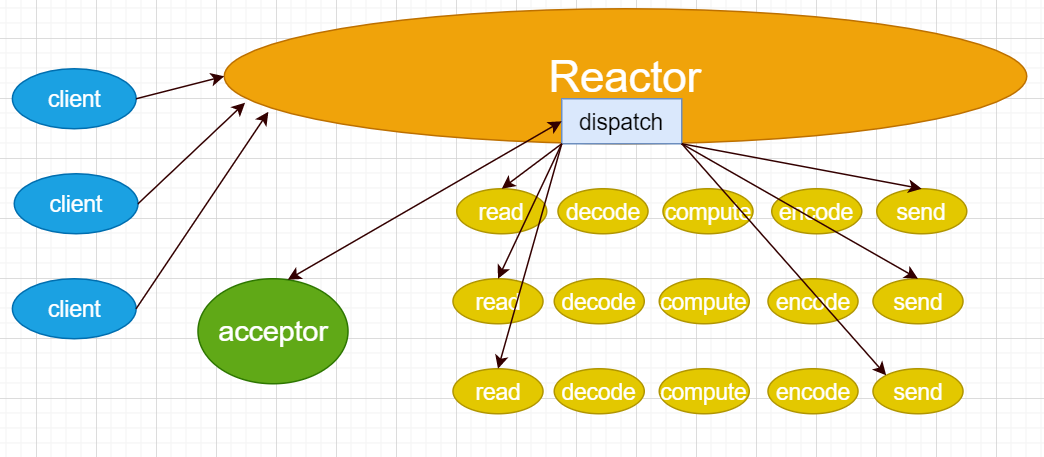
从图例中可以看到,多个客户端可以同时向Reactor服务器发起请求,而Reactor服务器是可以同时处理这些请求的。其中,Reactor使用IO多路复用技术监听多个客户端,但是为了能与多个客户端进行连接,所以注册了一个连接器Acceptor对象到Reactor中,进行连接事件的处理,也就是执行accept()函数,然后将连接交给Reactor对象,Reactor对象就对该连接进行对应的处理,读连接的数据,处理连接的数据,然后将处理好之后的数据发送给给个客户端,一条连接处理完毕之后继续处理下一条连接。其实这个过程,就是之前在Linux阶段,使用socket网络编程与IO多路复用(也就是epoll技术)实现的逻辑。接下来我们按照面向对象的思想进行重构。
ReactorV1版本
类的设计
为了思维的过渡,我们先将只实现基本的socket编程,然后以此为基础再添加epoll的逻辑。那么在基本的socket编程中,会使用socket创建套接字、bind绑定服务器的ip与port、listen监听客户端的连接、accept接收客户端的连接、然后进行业务逻辑的处理、最后关闭对应的文件描述符。然后使用面向对象
的设计,封装了下面五个类:
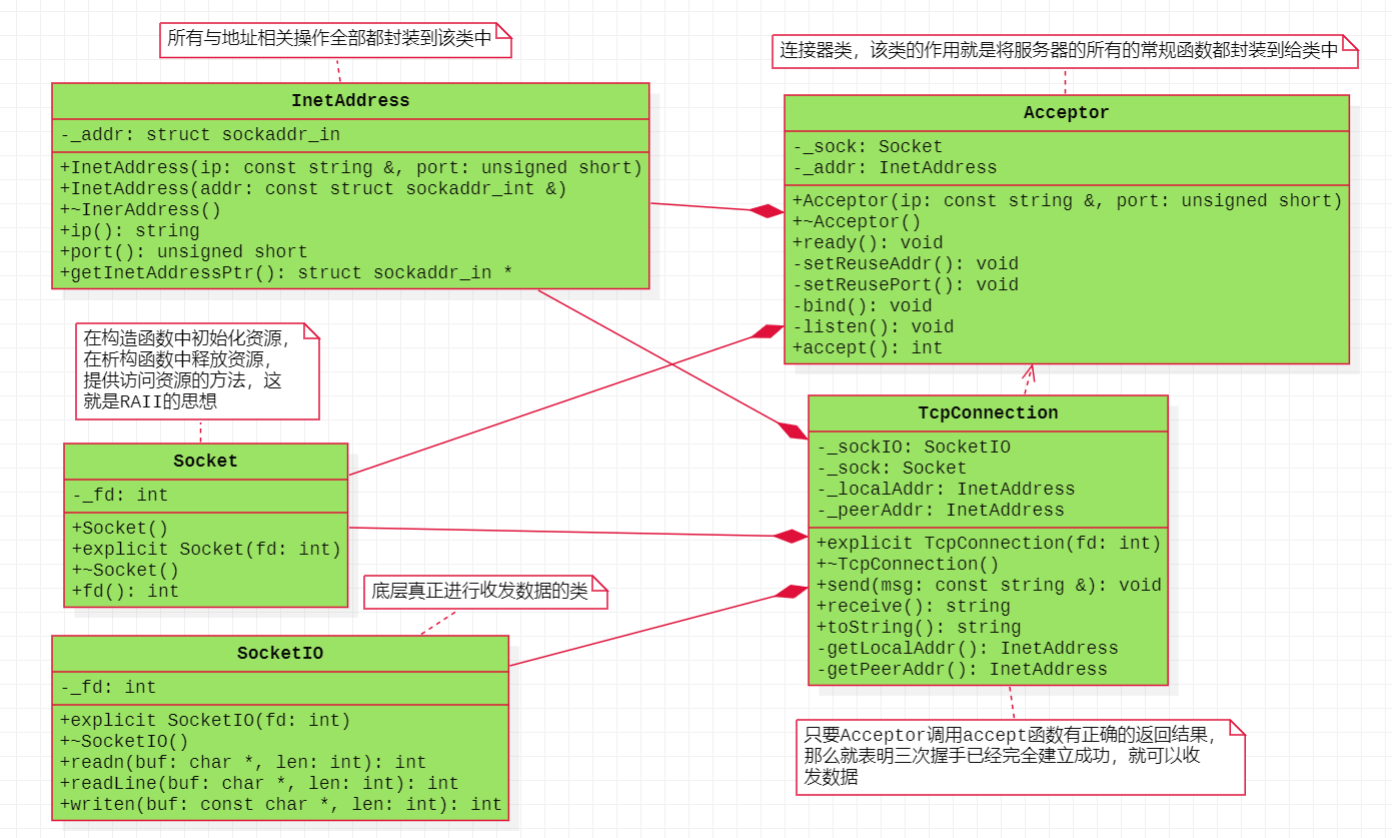
- Socket类:套接字类,将所有与套接字相关的操作都封装到该类中,包括:套接字的创建、套接字的关闭、套接字的获取。
- InetAddress类:地址类,将所有与地址相关的操作全部封装到该类中,包括:通过ip与端口号创建本对象、获取ip地址、获取port、获取struct sockarr_in的指针等等函数。
- Acceptor类:连接器类,将服务器的所有基本操作全部封装到该类中,包括:地址复用、端口复用、bind、listen、accept等。
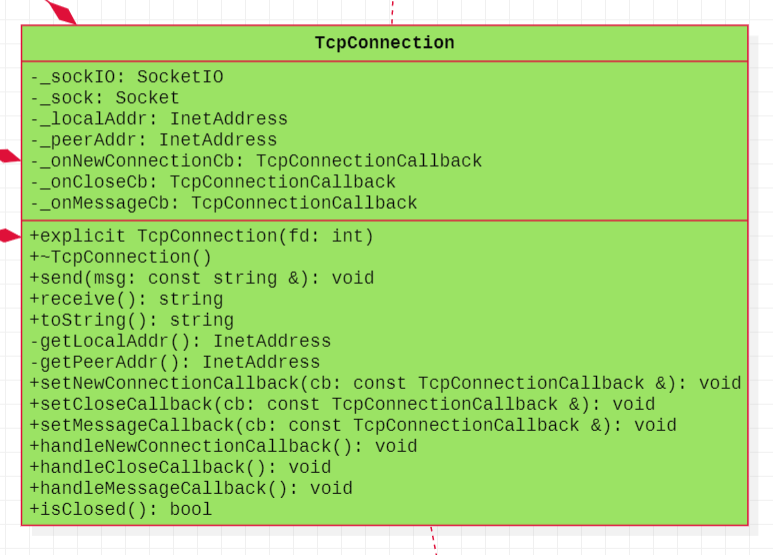
- TcpConnection类:TCP连接类,如果Acceptor类的对象调用accept函数有正确的返回结果,就表明三次握手建立成功了,就可以创建出一条通信的TCP连接。以后就可以通过该连接的对象进行数据的收发:发送数据使用send函数、接收数据使用receive函数,具体的数据收发细节不在该类中,而是单独交给另外一个类SocketIO。注意:为了起到调试代码的作用,这边增加对应的获取服务器地址的函数getLocalAddr、获取客户端地址的函数getPeerAddr、以及打印服务器与客户端ip与端口号的函数toString。
- SocketIO类:读写数据类,将真正数据收发的细节全部封装到该类中,例如:每次读任意个字节的数据、每次写任意个字节的数据、每次读一行的数据等。
类图设计
ReactorV2版本
类的设计
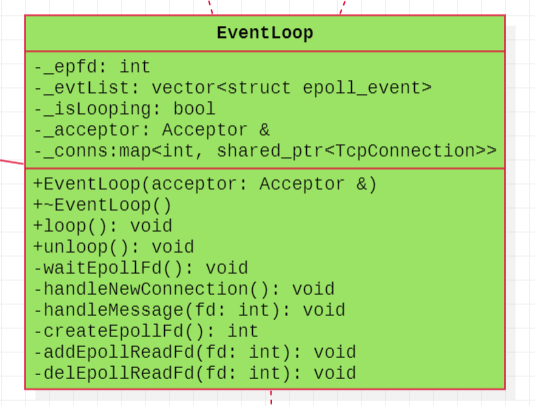
这个版本就是在上一个版本的基础上,添加对epoll的处理,也就是新增了一个事件循环类EventLoop:本质上就是将epoll的三个函数(epoll_create、epoll_ctl、epoll_wait)以及对应的两个文件描述符的可读事件的处理(Socket类创建的listenfd、以及Acceptor中的accept函数的返回的标识连接创建的文件描述符connfd)。对应的数据成员设计如下:
- epoll_create函数的返回结果,需要将其设置为数据成员,因为该文件描述符需要被epoll的另外两个函数进行使用,所以要设置为数据成员int _epfd
- epoll_wait函数需要将就绪的文件描述符放在struct epoll_event结构体,也就是填充epoll_wait的第二个参数,后续还需要使用该结构体,也需要将其设置为数据成员,
vector<struct epoll_event> _evtList - 如果监听的文件描述符listenfd可读,就说明有新的连接,就需要调用accept函数进行接受,但是该函数被封装到Acceptor类中了,所以需要使用Acceptor类创建的对象,才能获取到accept函数,可以使用Acceptor的对象(对应的应用也可以、对象的指针也可以,目的都是为了获取其中的成员函数accept),这里可以选择Acceptor类型的引用,
Acceptor &_acceptor; - 对于每一个accept执行结束后,说明连接已经建立,所以需要有一个对应的连接对象,也就TcpConnection,但是每个对象会关联一个文件描述符connfd,所以有一个记录文件描述符到TcpConnection的数据结构,可以使用键值对进行存储,这样以后就可以通过文件描述符就可以找到对应的连接,同时文件描述符是不重复的,所以这里可以选择的数据结构有map或者unordered_map,我们这里选择map,即
map<int, TcpConnection>,但是注意,TcpConnection是不能进行复制或者赋值的,并且创建出来之后还需要在后续使用该连接,所以最好可以设置为堆对象,否则有可能提前销毁了,所以为了更好的管理,可以使用智能指针shared_ptr管理,也就是map<int, shared_ptr<TcpConnection>> _conns; - 为了标识整个事件循环是否运行,可以设置标志位
bool _isLooping。
成员函数的设计如下:
- createEpollFd函数:作用就是为了封装epoll的epoll_create函数,创建文件描述符。
- addEpollReadFd函数:作用就是为了封装epoll的epoll_ctl函数,监听对应的文件描述符,例如:listenfd与connfd(这两个文件描述符上述都有描述)
- delEpollReadFd函数:作用也是为了封装epoll的epoll_ctl函数,不过是删除对文件描述符的监听。
- 构造函数:作用就是为了初始化数据成员,这里只有需要对引用数据成员需要额外进行初始化,所以使用EventLoop(Acceptor &acceptor)。
- 循环函数loop:对于IO多路复用epoll而言,核心就是大循环,里面封装epoll_wait函数。
- 非循环函数loop:这里可以让其不循环,直接跳出。
- waitEpollFd函数:里面封装epoll_wait函数,然后就是两大业务逻辑,文件描述符listenfd对应可读的新连接的建立、以及connfd文件描述符可读的读写操作。
- handleNewConnection函数:处理文件描述listenfd的可读事件,调用Acceptor中的accept函数获得文件描述符connfd以及使用文件描述符connfd创建连接TcpConnection的对象,然后监听文件描述符connfd,创建文件描述符connfd与连接TcpConnection的对象键值对,便于通过文件描述符可以找到对应的连接。
- handleMessage函数:通过文件描述符,映射出对应的连接,然后处理读写事件。
这就是对于epoll逻辑的分析而设计出来的数据成员与成员函数。
简易类图设计
TCP网络编程的三个半事件
再回顾一下对socket网络编程的认识,里面使用了TCP协议、TCP的三次握手建立连接、TCP的四次挥手断开连接、以及在连接建立好后与客户端进行数据的读写操作,这里面实际上包含着一些事件,也就是:
- 连接建立 :包括服务器端被动接受连接(accept)和客户端主动发起连接(connect)。TCP连接一旦建立,客户端和服务端就是平等的,可以各自收发数据。
- 连接断开 :包括主动断开(close、shutdown)和被动断开(read()返回 0 )。
- 消息到达 :文件描述符可读。这是最为重要的一个事件,对它的处理方式决定了网络编程的风格(阻塞还是非阻塞,如何处理分包,应用层的缓冲如何设计等等)。
- 消息发送完毕 :这算半个。对于低流量的服务,可不必关心这个事件;另外,这里的“发送完毕”是指数据写入操作系统缓冲区(内核缓冲区),将由TCP协议栈负责数据的发送与重传,不代表对方已经接收到数据。
三个事件的添加
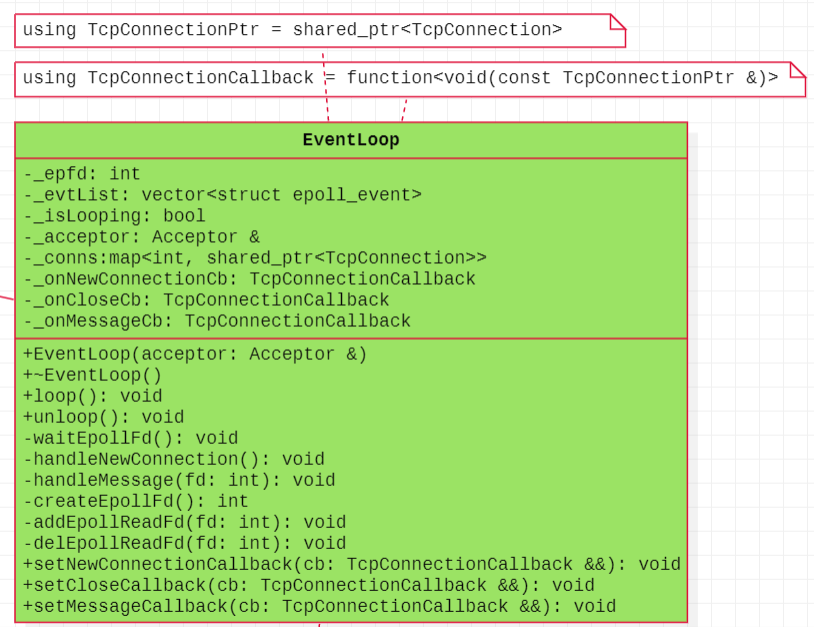
TCP网络编程中,确实存在主要的三个事件:连接的建立、连接的断开、消息到达(文件描述可读),那么这三个事件在发生的时候,我们的服务器到底要做什么,如何做这些事件呢,我们需要做处理。比如:连接建立的时候,是不是可以可以知道服务器自己的信息ip与port、客户端的信息ip与port呢,这不就是连接建立可以做的事件吗,当然连接建立之后还有可能做其他事件,那到底做什么事件我们不得而知,但是可以预先将要做的事件框架注册上来,等满足条件的时候再执行不就可以了吗,这不就是回调函数的思想, 注册回调函数与实现回调函数 。也就是可以使用手段std::function将函数类型设置出来,然后创建对象,最后回调函数。(类似之前的基于对象的实现方式)。三个事件对应三个回调函数,并且三个回调都是与连接TcpConnection相关的。但是连接TcpConnection对象本身都是在EventLoop中创建的,所以需要将三个回调先注册给EventLoop对象作为中转,然后交给TcpConnection对象进行注册与执行( 注意:这个思路非常重要,希望重点思考一下,想清楚这里面的原因 ),既然是使用std::function,就需要封装函数类型,但是本次每个函数类型都要与连接TcpConnection对象相关,并且是需要以EventLoop作为中转最好交给TcpConnection对象的,所以类型是 function<void(const shared_ptr<TcpConnection> &)>,因为在数据成员键值对map中存储的是TcpConnection的智能指针类型,所以后面使用的时候都是TcpConnection的智能指针类型( 注意:这里是代码层面上的使用,使用智能指针类型 )。既然需要先注册给EventLoop,那么就需要在其中有三个数据成员:
function<void(const shared_ptr<TcpConnection> &)> _onConnectionCb;
function<void(const shared_ptr<TcpConnection> &)> _onMessageCb;
function<void(const shared_ptr<TcpConnection> &)> _onCloseCb;然后三个成员函数setNewConnectionCallback、setMessageCallback、setCloseCallback,三个函数的参数类型与数据成员的类型一致,但是对于EventLoop而言,只需要注册,不需要执行,最终的执行要交给TcpConnection的对象。那么TcpConnection类中也需要注册三个回调函数,并且好需要执行三个回调函数。 这就是三个回调函数的添加思想,希望大家多思考一下这个过程,有一定的难度 。
于是需要修改类图的设计。
思考题:这里为何在EventLoop中,三个回调函数的注册采用的是右值引用的方式,但是在
TcpConnection中使用的是const左值引用的形式呢?在TcpConnection中能不能直接使用右值引用的
形式呢?
核心代码
EventLoop::EventLoop(Acceptor &acceptor)
: _epfd(createEpollFd()), _evtList(1024), _isLooping(false), _acceptor(acceptor) {
// 将listenfd放在红黑树上进行监听
int listenfd = _acceptor.fd();
addEpollReadFd(listenfd);
}
EventLoop::~EventLoop() {
close(_epfd);
}
// 事件循环与否
void EventLoop::loop() {
_isLooping = true;
while (_isLooping) {
waitEpollFd();
}
}
void EventLoop::unloop() {
_isLooping = false;
}
// 封装了epoll_wait函数
void EventLoop::waitEpollFd() {
int nready = 0;
do {
nready = epoll_wait(_epfd, &*_evtList.begin(), _evtList.size(), 3000);
} while ((-1 == nready && errno == EINTR));
if (-1 == nready) {
cerr << "-1 == nready" << endl;
return;
} else if (0 == nready) {
cout << ">>epoll_wait timeout!!!" << endl;
} else {
// 如果监听文件描述的个数超过设置的 1024 的,不能再进行扩容
if (nready == (int)_evtList.size()) {
_evtList.resize(2 * nready);
}
for (int idx = 0; idx < nready; ++idx) {
// 连接是listenfd
int fd = _evtList[idx].data.fd;
int listenfd = _acceptor.fd();
if (fd == listenfd) {
if (_evtList[idx].events & EPOLLIN) {
// 处理新的连接
handleNewConnection();
}
} else // 处理老的连接
{
if (_evtList[idx].events & EPOLLIN) {
handleMessage(fd);
}
}
}
}
}
// 处理新的连接请求
void EventLoop::handleNewConnection() {
// 如果connfd有正确返回结果,就表明三次握手建立成功,
// 就可以创建连接
int connfd = _acceptor.accept();
if (connfd < 0) {
perror("handleNewConnection accept");
return;
}
// 将创建出来的文件描述符放在红黑树上进行监听
addEpollReadFd(connfd);
// 创建新的连接
/* shared_ptr<TcpConnection> con(new TcpConnection(connfd)); */
TcpConnectionPtr con(new TcpConnection(connfd));
// 将三个数据成员(回调函数)传递给连接TcpConnection
con->setNewConnectionCallback(_onNewConnectionCb); // 连接建立
con->setMessageCallback(_onMessageCb); // 消息到达
con->setCloseCallback(_onCloseCb); // 连接断开
// 将键值对存放在map中
/* _conns.insert({connfd, con}); */
_conns[connfd] = con;
// 连接建立的时机到了,就可以进行回调执行
con->handleNewConnectionCallback();
}
// 处理老的连接
void EventLoop::handleMessage(int fd) {
auto it = _conns.find(fd);
if (it != _conns.end()) {
// 如何判断连接是不是断开呢
bool flag = it->second->isClosed();
if (flag) {
// 连接断开了
it->second->handleCloseCallback(); // 处理连接断开的事件
delEpollReadFd(fd); // 将文件描述符从红黑树上摘除掉
_conns.erase(it); // 将文件描述符与连接的键值对从map中删除
} else {
// 消息在正常的收发
it->second->handleMessageCallback(); // 消息到达(文件描述符可读)
}
} else {
cout << "该连接不存在" << endl;
return;
}
}
// 创建epfd的函数
int EventLoop::createEpollFd() {
int fd = epoll_create(10);
if (fd < 0) {
perror("createEpollFd");
return fd;
}
return fd;
}
// 监听文件描述符
void EventLoop::addEpollReadFd(int fd) {
struct epoll_event evt;
evt.events = EPOLLIN;
evt.data.fd = fd;
int ret = epoll_ctl(_epfd, EPOLL_CTL_ADD, fd, &evt);
if (ret < 0) {
perror("addEpollReadFd");
return;
}
}
// 删除监听文件描述符
void EventLoop::delEpollReadFd(int fd) {
struct epoll_event evt;
evt.events = EPOLLIN;
evt.data.fd = fd;
int ret = epoll_ctl(_epfd, EPOLL_CTL_DEL, fd, &evt);
if (ret < 0) {
perror("delEpollReadFd");
return;
}
}
void EventLoop::setNewConnectionCallback(TcpConnectionCallback &&cb) {
_onNewConnectionCb = std::move(cb);
}
void EventLoop::setMessageCallback(TcpConnectionCallback &&cb) {
_onMessageCb = std::move(cb);
}
void EventLoop::setCloseCallback(TcpConnectionCallback &&cb) {
_onCloseCb = std::move(cb);
}在TcpConnection类中新增的函数
// 三个回调的注册
void TcpConnection::setNewConnectionCallback(const TcpConnectionCallback &cb) {
_onNewConnectionCb = cb;
}
void TcpConnection::setMessageCallback(const TcpConnectionCallback &cb) {
_onMessageCb = cb;
}
void TcpConnection::setCloseCallback(const TcpConnectionCallback &cb) {
_onCloseCb = cb;
}
// 三个回调的执行
void TcpConnection::handleNewConnectionCallback() {
if (_onNewConnectionCb) {
/* _onNewConnectionCb(shared_ptr<TcpConnection>(this)); */
_onNewConnectionCb(shared_from_this());
} else {
cout << "_onNewConnectionCb == nullptr" << endl;
}
}
void TcpConnection::handleMessageCallback() {
if (_onMessageCb) {
_onMessageCb(shared_from_this());
} else {
cout << "_onMessageCb == nullptr" << endl;
}
}
void TcpConnection::handleCloseCallback() {
if (_onCloseCb) {
_onCloseCb(shared_from_this());
} else {
cout << "_onCloseCb == nullptr" << endl;
}
}RectorV3版本
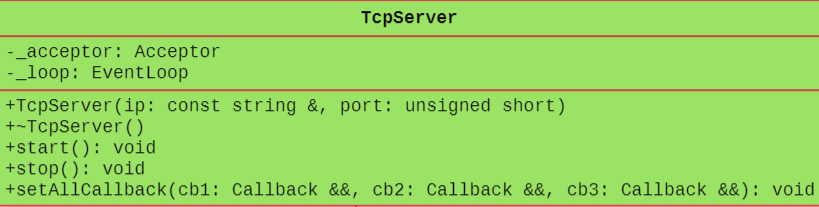
本版本其实没有做任何的改变,只是进一步做封装而已。
Acceptor _acceptor;
EventLoop _loop;
TcpServer(const string &ip, unsigned short port); // 初始化两个数据成员
void start(); // 执行Acceptor的ready函数,以及EventLoop的loop函数
void stop(); // 执行EventLoop中的unloop函数
void setAllCallbacks(function<void(const shared_ptr<TcpConnection> &)> &&onConnection,
function<void(const shared_ptr<TcpConnection> &)> &&onMessage,
function<void(const shared_ptr<TcpConnection> &)> &&onClose);类图设计
到此为止,我们才将基本的Reactor版本进行了实现,但是版本会存在一个问题,IO操作与非IO操作都是一起处理的,那么一旦业务逻辑的处理,decode、compute、encode的处理很耗时,本版本就会存在性能瓶颈,就需要改为线程池版本。
ReactorV4版本
原理图
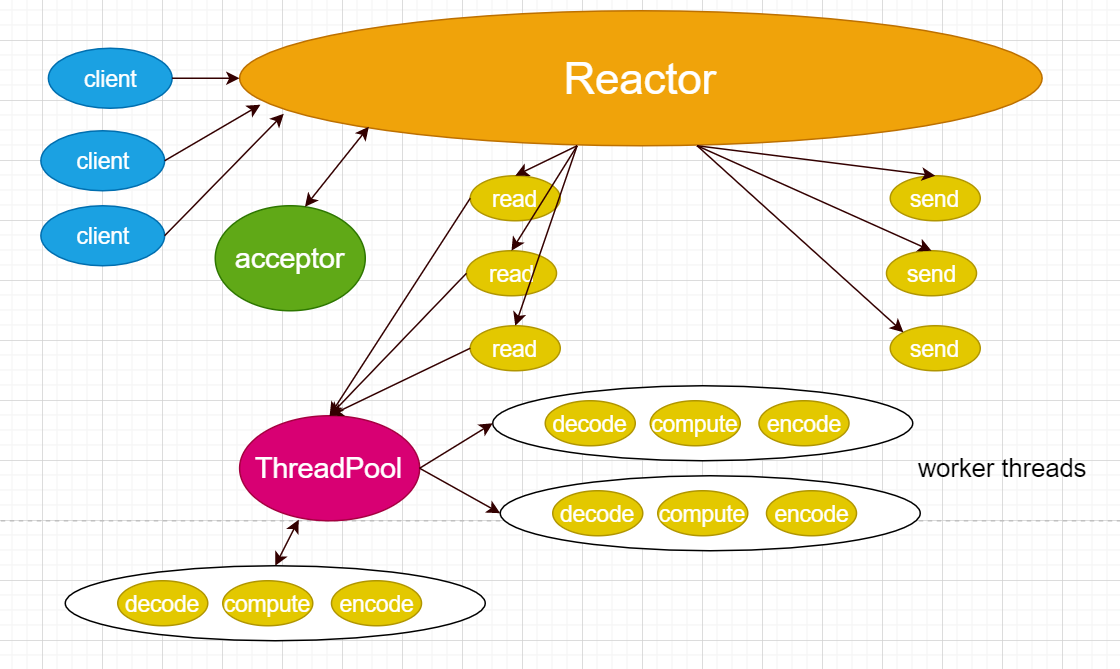
原理分析
本模型相对于基本的Reactor模型而言,可以将业务逻辑的处理交给线程池来进行处理,这样能够提高Reactor线程的I/O响应,不至于因为一些耗时的业务逻辑而延迟对后面I/O请求的处理,可以进一步提高性能。但是在本模型中,Reactor在获得连接后,需要采用TcpConnection对象读取数据,也就是执行Read操作(代码中是receive函数),然后将获取到的数据交给线程池的对象进行处理,其实也即是将数据当做任务交给线程池即可,这个比较简单,之前的线程池版本中就实现了添加任务与获取任务,然后让线程池中的线程处理任务,当线程池处理好业务逻辑的处理(decode、compute、encode)后,线程池中的线程(也就是线程池对象)需要通知Reactor对象,并将处理好之后的数据发送给客户端,这里就存在一个问题,线程池对象如何与Reactor线程之间进行通信?通信之后数据如何传递给Reactor?Reactor如何将数据发送给客户端?
问题一:线程池与Reactor之间通信的方式有哪些?这里可以采用系统调用eventfd的方式(原理如何、怎么使用后面会讲解),学会了就可以解决本版本的问题,可以跳转到eventfd,学习其原理学习以及使用方式。
问题二:数据如何传递给Reactor?这里面会将数据通过相应的函数传递给Reactor,这个与具体的代码设计相关,因为在第三个版本中,线程池中会有TcpConnection的对象,而TcpConnection对象都是在EventLoop中创建的,所以很好传递到Reactor/EventLoop中。
问题三:Reactor如何将数据发送给客户端?很简单,借助TcpConnection对象的send函数发送即可。
类图设计
将用于通信的eventfd系统调用(也就是线程之间通信的代码)封装到ReactorV3版本的EventLoop类中,然后只要线程池中的线程在执行完业务逻辑的处理之后,调用wakeup唤醒Reactor线程( 注意:名为唤醒,其实Reactor线程并不会真正的阻塞,而是负责监听用于通信的文件描述符即可,只要就绪,就可以处理发送任务给客户端了,如果真的Reactor在睡眠,那么新的连接上来了,线程不就阻塞住了吗 ),也就是通知Reactor线程即可,然后执行发送操作,将数据发送给客户端即可。
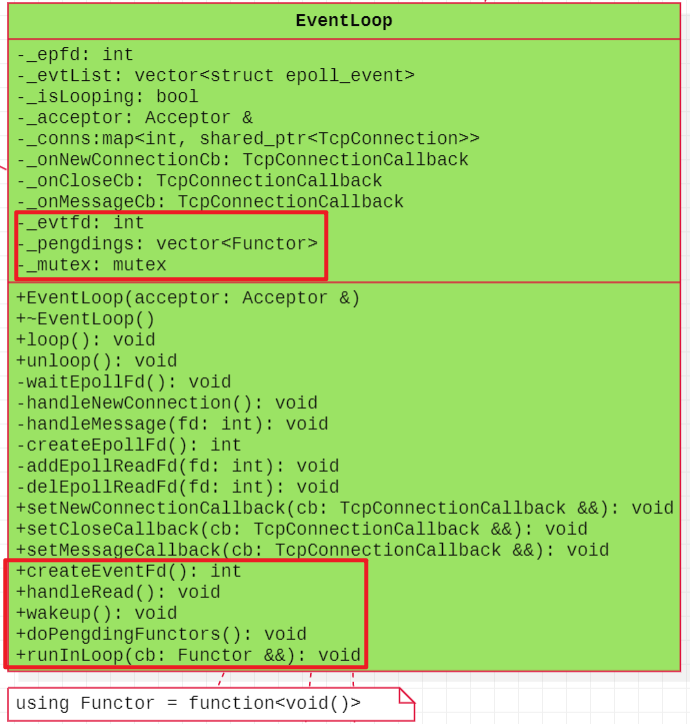
数据成员:
就是将线程之间进行通信的文件描述符int _evtfd
线程池处理完之后要通过Reactor发送给客户端的 任务 比较多,所以就用容器存起来
vector<Functor> _pengdings多个线程对容器vector的访问是互斥的,需要加锁mutex _mutex
成员函数:
- createEventFd函数:调用eventfd系统调用创建用于通信的文件描述符。
- handleRead函数:里面封装了read函数,该函数读取eventfd返回的文件描述符。
- wakeup函数:里面封装了write函数,该函数向eventfd返回的文件描述符中写数据,也就是唤醒阻塞的线程,从而达到通信的目的。
- doPengdingFunctors函数:就是将存放在vector中的 任务 进行执行,这里的 任务 比较多,所以需要遍历。
- runInLoop函数:vector中的任务是如何传递进来的?本函数就是将线程池处理好之后的要发送给客户端的数据,最终传递到vector中的,主要是做这个事情。
思考题:vector存放的任务,这里的任务到底是什么,难道只是线程池处理好要发送给客户端的数据
吗?
核心函数
EventLoop::EventLoop(Acceptor &acceptor)
: _epfd(createEpollFd()), _evtList(1024), _isLooping(false), _acceptor(acceptor), _evtfd(createEventFd()), _mutex() {
// 将listenfd放在红黑树上进行监听
int listenfd = _acceptor.fd();
addEpollReadFd(listenfd);
// 将用于通信的文件描述符进行监听
addEpollReadFd(_evtfd);
}
EventLoop::~EventLoop() {
close(_epfd);
close(_evtfd);
}
// 事件循环与否
void EventLoop::loop() {
_isLooping = true;
while (_isLooping) {
waitEpollFd();
}
}
void EventLoop::unloop() {
_isLooping = false;
}
// 封装了epoll_wait函数
void EventLoop::waitEpollFd() {
int nready = 0;
do {
nready = epoll_wait(_epfd, &*_evtList.begin(), _evtList.size(),
3000);
} while ((-1 == nready && errno == EINTR));
if (-1 == nready) {
cerr << "-1 == nready" << endl;
return;
} else if (0 == nready) {
cout << ">>epoll_wait timeout!!!" << endl;
} else {
// 如果监听文件描述的个数超过设置的 1024 的,不能再进行扩容
if (nready == (int)_evtList.size()) {
_evtList.resize(2 * nready);
}
for (int idx = 0; idx < nready; ++idx) {
// 连接是listenfd
int fd = _evtList[idx].data.fd;
int listenfd = _acceptor.fd();
if (fd == listenfd) {
if (_evtList[idx].events & EPOLLIN) {
// 处理新的连接
handleNewConnection();
}
}
// 监听的用于通信的文件描述符就绪了
else if (fd == _evtfd) {
if (_evtList[idx].events & EPOLLIN) {
handleRead();
// 执行所有的"任务"
doPengdingFunctors();
}
} else // 处理老的连接
{
if (_evtList[idx].events & EPOLLIN) {
handleMessage(fd);
}
}
}
}
}
// 处理新的连接请求
void EventLoop::handleNewConnection() {
// 如果connfd有正确返回结果,就表明三次握手建立成功,
// 就可以创建连接
int connfd = _acceptor.accept();
if (connfd < 0) {
perror("handleNewConnection accept");
return;
}
// 将创建出来的文件描述符放在红黑树上进行监听
addEpollReadFd(connfd);
// 创建新的连接
/* shared_ptr<TcpConnection> con(new TcpConnection(connfd)); */
TcpConnectionPtr con(new TcpConnection(connfd, this));
// 将三个数据成员(回调函数)传递给连接TcpConnection
con->setNewConnectionCallback(_onNewConnectionCb); // 连接建立
con->setMessageCallback(_onMessageCb); // 消息到达
con->setCloseCallback(_onCloseCb); // 连接断开
// 将键值对存放在map中
/* _conns.insert({connfd, con}); */
_conns[connfd] = con;
// 连接建立的时机到了,就可以进行回调执行
con->handleNewConnectionCallback();
}
// 处理老的连接
void EventLoop::handleMessage(int fd) {
auto it = _conns.find(fd);
if (it != _conns.end()) {
// 如何判断连接是不是断开呢
bool flag = it->second->isClosed();
if (flag) {
// 连接断开了
it->second->handleCloseCallback(); // 处理连接断开的事件
delEpollReadFd(fd); // 将文件描述符从红黑树上摘除掉
_conns.erase(it); // 将文件描述符与连接的键值对从map中删除
} else {
// 消息在正常的收发
it->second->handleMessageCallback(); // 消息到达(文件描述符可读)
}
} else {
cout << "该连接不存在" << endl;
return;
}
}
// 创建epfd的函数
int EventLoop::createEpollFd() {
int fd = epoll_create(10);
if (fd < 0) {
perror("createEpollFd");
return fd;
}
return fd;
}
// 监听文件描述符
void EventLoop::addEpollReadFd(int fd) {
struct epoll_event evt;
evt.events = EPOLLIN;
evt.data.fd = fd;
int ret = epoll_ctl(_epfd, EPOLL_CTL_ADD, fd, &evt);
if (ret < 0) {
perror("addEpollReadFd");
return;
}
}
// 删除监听文件描述符
void EventLoop::delEpollReadFd(int fd) {
struct epoll_event evt;
evt.events = EPOLLIN;
evt.data.fd = fd;
int ret = epoll_ctl(_epfd, EPOLL_CTL_DEL, fd, &evt);
if (ret < 0) {
perror("delEpollReadFd");
return;
}
}
void EventLoop::setNewConnectionCallback(TcpConnectionCallback &&cb) {
_onNewConnectionCb = std::move(cb);
}
void EventLoop::setMessageCallback(TcpConnectionCallback &&cb) {
_onMessageCb = std::move(cb);
}
void EventLoop::setCloseCallback(TcpConnectionCallback &&cb) {
_onCloseCb = std::move(cb);
}
int EventLoop::createEventFd() {
int fd = eventfd(10, 0);
if (fd < 0) {
perror("eventfd");
return fd;
}
return fd;
}
void EventLoop::handleRead() {
uint64_t one = 1;
ssize_t ret = read(_evtfd, &one, sizeof(uint64_t));
}ReactorV5版本
本版本只是在上一个版本的基础上,进一步的做封装,将线程池与TcpServer对象进一步封装。
if(ret != sizeof(uint64_t))
{
perror("read");
return;
}
}
void EventLoop::wakeup()
{
uint64_t one = 1 ;
ssize_t ret = write(_evtfd, &one, sizeof(uint64_t));
if(ret != sizeof(uint64_t))
{
perror("wakeup");
return;
}
}
void EventLoop::doPengdingFunctors()
{
vector<Functor> tmp;
{
lock_guard<mutex> lg(_mutex);
tmp.swap(_pengdings);
}
//将所有的任务都进行执行
for(auto &cb : tmp)
{
cb();//回调的执行
}
}
void EventLoop::runInLoop(Functor &&cb)
{
{
lock_guard<mutex> lg(_mutex);
_pengdings.push_back(std::move(cb));
}
//线程池就需要通知EventLoop执行“任务”
wakeup();
}
ThreadPool _pool;
TcpServer _server;
EchoServer(size_t threadNum, size_t queSize, const string &ip, unsigned
short port);
~EchoServer();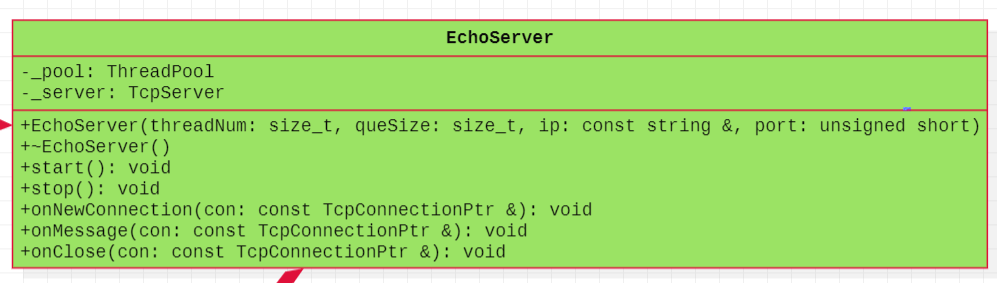
进线程通信方式eventfd
作用
从Linux 2.6.27版本开始,新增了不少系统调用,其中包括eventfd,它的主要是用于进程或者线程间通
信(如通知/等待机制的实现)
函数接口
#include <sys/eventfd.h>
int eventfd(unsigned int initval, int flags);- initval:初始化计数器值,该值保存在内核。
- flags:如果是2.6.26或之前版本的内核,flags 必须设置为0。 flags支持以下标志位:
- EFD_NONBLOCK 类似于使用O_NONBLOCK标志设置文件描述符。
- EFD_CLOEXEC 类似open以O_CLOEXEC标志打开, O_CLOEXEC 应该表示执行exec()时,之前通 过open()打开的文件描述符会自动关闭。
返回值:函数返回一个文件描述符,与打开的其他文件一样,可以进行读写操作。
eventfd支持的操作
eventfd系统调用返回的是文件描述符,该文件描述符与以前学习的文件描述符一样,可以读、写、监听。
read函数:如果计数器A的值不为 0 时,读取成功,获得到该值;如果A的值为 0 ,非阻塞模式时,会直接返回失败,并把error置为EINVAL;如果为阻塞模式,一直会阻塞到A为非 0 为止。
write函数:将缓冲区写入的 8 字节整形值加到内核计数器上,即会增加 8 字节的整数在计数器A上,如果其值达到0xfffffffffffffffe时,就会阻塞(在阻塞模式下),直到A的值被read。
select/poll/epoll:支持被io多路复用监听。当内核计数器的值发生变化时,就会触发事件。
通过对eventfd函数返回的文件描述符进行通信。一个进程或者线程A执行read操作,如果内核计数器的值为 0 ,并且是阻塞模式,那么A就会阻塞;另外一个进程或者线程B执行write操作,就会向内核计数器写,那么阻塞的A发现内核计数器的值不为 0 ,就会被触发,那么两个进程或者线程A与B就达到通信的目的了。
进程之间通信
在man手册中,是存在进程之间通信的方式的,代码如下
#include <stdint.h> /* Definition of uint64_t */
#include <stdio.h>
#include <stdlib.h>
#include <sys/eventfd.h>
#include <unistd.h>
#define handle_error(msg) \
\ do { \
perror(msg); \
exit(EXIT_FAILURE); \
} \
while (0)
int main(int argc, char *argv[]) {
int efd, j;
uint64_t u;
ssize_t s;
if (argc < 2) {
fprintf(stderr, "Usage: %s <num>...\n", argv[0]);
exit(EXIT_FAILURE);
}
efd = eventfd(10, 0); // eventfd的第一个参数代表的是内核上的计数器
if (efd == -1) {
handle_error("eventfd");
}
switch (fork()) {
case 0:
// case 0部分是子线程的执行流
for (j = 1; j < argc; j++) {
// 打印命令行参数的值
printf("Child writing %s to efd\n", argv[j]); // 将命令行参数从字符串转换为整型
u = strtoull(argv[j], NULL, 0);
/* strtoull() allows various bases */
// write可以写多次, 每执行一次,就会执行一次加法
s = write(efd, &u, sizeof(uint64_t));
if (s != sizeof(uint64_t)) {
handle_error("write");
}
sleep(1);
}
printf("Child completed write loop\n");
exit(EXIT_SUCCESS);
default:
// 父线程的一个执行流 sleep(2);
for (int idx = 2; idx < argc; ++idx) {
printf("Parent about to read\n"); // read操作会将计数器的值清0
s = read(efd, &u, sizeof(uint64_t));
if (s != sizeof(uint64_t)) {
handle_error("read");
}
// 将从内核计数器读到的值以不同进制的形式打印出来
printf("Parent read %llu (0x%llx) from efd\n", (unsigned long long)u, (unsigned long long)u);
sleep(1);
}
exit(EXIT_SUCCESS);
case -1:
handle_error("fork");
}
}父进程通过eventfd返回的文件描述进行 读数据 ,子进程通过eventfd返回的文件描述符进行 写数据 ,如果父进程读到的内核计数器的值为 0 ,就会阻塞,但是只要子进程写数据到内核计数器,那么父进程就会被唤醒达到通信的目的(这里父进程读到了内核计数器维护的值)
线程之间通信
与进程之间通信模式类似,我们可以在线程之间进行通信,一个线程A读取eventfd返回的文件描述符,如果读取到的内核计数器的值为 0 ,那么就会阻塞;而另外一个线程B向eventfd返回的文件描述符进行写数据,就会唤醒A线程,从而达到B唤醒A,达到B线程(写线程)唤醒(通知)A线程的目的,这样两个线程之间就可以达到通信的目的,就是这个原理。在进程之间通信之后,父进程在读内核计数器的值,这里可以让A线程阻塞等待执行某种任务,只要不被B唤醒,A就一直阻塞,只有被唤醒就可以执行任务。那么使用面向对象封装,可以进行类图设计如下:
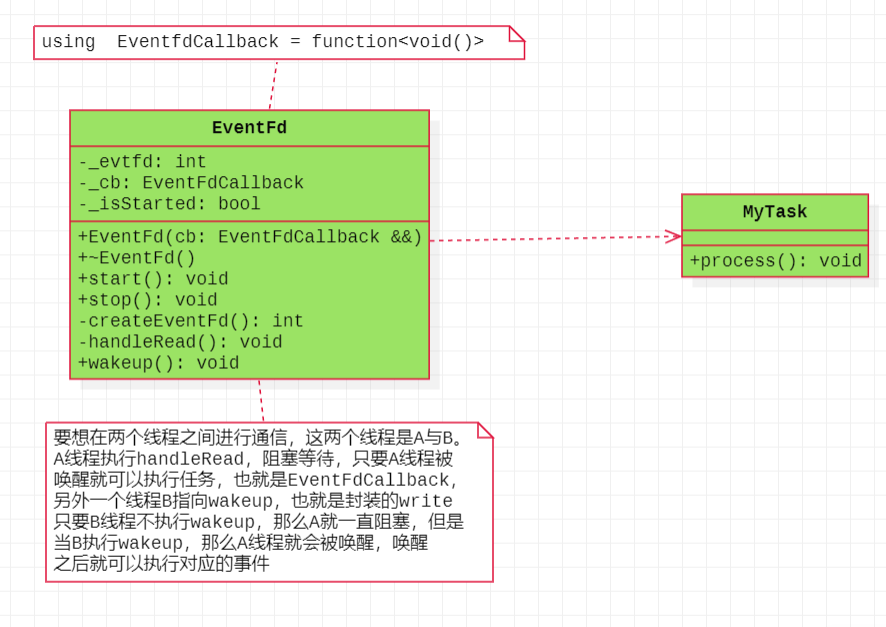
数据成员:
- 用于通信的文件描述符,也就是eventfd返回的文件描述符int _evtfd
- 被唤醒的线程需要执行的任务 EventFdCallback _cb
- 标识EventFd运行标志的标志位 bool _isStarted
成员函数:
- start函数:该函数启动,并通过IO多路复用方式select/poll/epoll中的一种循环监视数据成员,用于通信的文件描述符_evtfd是不是就绪,如果就绪就可以让线程读该文件描述符并且执行被唤醒后需要执行的事件,也即是EventFdCallback类型的任务。
- stop函数:停止运行。
- handleRead函数:里面封装了read函数,该函数读取eventfd返回的文件描述符。
- wakeup函数:里面封装了write函数,该函数向eventfd返回的文件描述符中写数据,也就是唤醒阻塞的线程,从而达到通信的目的
核心函数:
EventFd::EventFd(EventFdCallback &&cb)
: _evtfd(createEventFd()), _cb(std::move(cb)) // 注册
,
_isStarted(false) {
}
EventFd::~EventFd() {
close(_evtfd);
}
// 运行与停止
void EventFd::start() {
struct pollfd pfd;
pfd.fd = _evtfd;
pfd.events = POLLIN;
_isStarted = true;
while (_isStarted) {
int nready = poll(&pfd, 1, 3000);
if (-1 == nready && errno == EINTR) {
continue;
} else if (-1 == nready) {
cerr << "-1 == nready" << endl;
return;
} else if (0 == nready) {
cout << ">>poll timeout!!!" << endl;
} else {
if (pfd.revents & POLLIN) {
handleRead(); // 阻塞等待被唤醒
if (_cb) {
_cb(); // 通信之后需要执行的任务
}
}
}
}
}
void EventFd::stop() {
_isStarted = false;
}
// 创建用于通信的文件描述符
int EventFd::createEventFd() {
int ret = eventfd(10, 0);
if (ret < 0) {
perror("eventfd");
return ret;
}
return ret;
}
// A线程需要执行的read的操作
void EventFd::handleRead() {
uint64_t one = 1;
ssize_t ret = read(_evtfd, &one, sizeof(uint64_t));
}定时器
作用
timerfd是Linux提供的一个定时器接口。这个接口基于文件描述符, 通过文件描述符的可读事件进行超时通知 ,所以能够被用于select/poll/epoll的应用场景。timerfd是linux内核2.6.25版本中加入的接口
函数接口
#include <sys/timerfd.h>
int timerfd_create(int clockid, int flags);参数详解:
- clockid:可设置为 CLOCK_REALTIME:相对时间,从1970.1.1到目前的时间。更改系统时间 会更改获取的值,它以系 统时间为标。 CLOCK_MONOTONIC:绝对时间,获取的时间为系统重启到现在的时间,更改系统时间对齐没有影响。
- flags: 可设置为 TFD_NONBLOCK(非阻塞);TFD_CLOEXEC(同O_CLOEXEC)linux内核2.6.26版本以上都指定为0
返回值:该函数生成一个定时器对象,返回与之关联的文件描述符。
int timerfd_settime(int fd, int flags, const struct itimerspec *new_value, struct itimerspec *old_value);参数详解:
- fd : timerfd对应的文件描述符
- flags : 0表示是相对定时器; TFD_TIMER_ABSTIME表示是绝对定时器
- new_value : 设置超时时间,如果为0则表示停止定时器。
- old_value : 一般设为NULL, 不为NULL, 则返回定时器这次设置之前的超时时间。
struct timespec {
time_t tv_sec; // 精确到秒数
long tv_nsec; // 精确到纳秒数
};
struct itimerspec {
struct timespec it_interval; // 定时器周期时间,前后两次超时时间差
struct timespec it_value; // 定时器起始时间,比如:12:00:00开始,或者相对某个时 间点开始技时
};返回值:该函数能够启动和停止定时器。
支持的操作
定时器对象(也就是定时器创建出来的文件描述符),是可以被读以及监听的。
read函数:读取缓冲区中的数据,其占据的存储空间为sizeof(uint64_t),表示超时次数。
select/poll/epoll:当定时器超时时,会触发定时器相对应的文件描述符上的读操作,IO多路复用操作会返回,然后再去对该读事件进行处理。
其实就是定时器对象在设置好定时操作后,当设置的超时时间到达后,定时器对象就就绪,就可以被读取了,然后当设置的超时时间到达后,定时器对象就就绪,就可以又被读取了,以此往复。
线程间通信
设置好定时器对象(就像设置的闹钟一样),当定时器超时后,会发出超时通知,如果线程之前在循环监视对应的文件描述符,那么文件描述符就会就绪(可读),就可以执行read函数,接下来就可以执行预先设置好的任务。当定时器后续继续超时后,监听的文件描述符会继续就绪,文件描述符继续可读,就可以继续执行任务了,所以可见,每间隔指定的时间,线程都会因为超时而被唤醒,也就达到通知的目的。那么使用面向对象封装,可以进行类图设计如下:
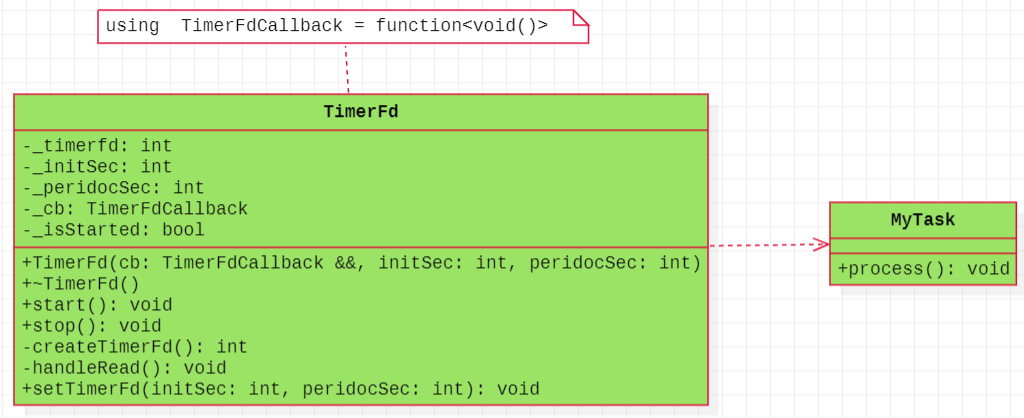
数据成员:
- 用于超时通知的文件描述符,也就是timerfd_create创建的文件描述符int _timerfd
- 定时器初始时间与超时时间int _initSec int _peridocSec
- 被唤醒的线程需要执行的任务 TimerFdCallback _cb
- 标识EventFd运行标志的标志位 bool _isStarted
成员函数:
- start函数:该函数启动,并通过IO多路复用方式select/poll/epoll中的一种循环监视数据成员,用于超时通知的文件描述符_timerffd是不是就绪,如果就绪就可以让线程读该文件描述符并且执行被唤醒后需要执行的事件,也即是TimerFdCallback类型的任务。
- stop函数:停止运行。
- handleRead函数:里面封装了read函数,该函数读取timerfd_create返回的文件描述符。
- setTimerFd函数:里面封装了timerfd_settime函数,用于设定定时器的起始时间与超时时间,可以是启动定时器或者关闭定时器(起始时间与超时时间都为 0 )
核心函数:
TimerFd::TimerFd(TimerFdCallback &&cb, int initSec, int peridocSec)
: _tfd(createTimerFd()), _initSec(initSec), _peridocSec(peridocSec), _cb(std::move(cb)) // 注册
,
_isStarted(false) {
}
TimerFd::~TimerFd() {
setTimerFd(0, 0);
close(_tfd);
}
// 运行与停止
void TimerFd::start() {
struct pollfd pfd;
pfd.fd = _tfd;
pfd.events = POLLIN;
// 设定了定时器
setTimerFd(_initSec, _peridocSec);
_isStarted = true;
while (_isStarted) {
int nready = poll(&pfd, 1, 3000);
if (-1 == nready && errno == EINTR) {
continue;
} else if (-1 == nready) {
cerr << "-1 == nready" << endl;
return;
} else if (0 == nready) {
cout << ">>poll timeout!!!" << endl;
} else {
if (pfd.revents & POLLIN) {
handleRead(); // 阻塞等待被唤醒
if (_cb) {
_cb(); // 通信之后需要执行的任务
}
}
}
}
}
void TimerFd::stop() {
if (_isStarted) {
_isStarted = false;
setTimerFd(0, 0);
}
}
// 创建用于通信的文件描述符
int TimerFd::createTimerFd() {
int ret = timerfd_create(CLOCK_REALTIME, 0);
if (ret < 0) {
perror("createTimerFd");
return ret;
}
return ret;
}
// A线程需要执行的read的操作
void TimerFd::handleRead() {
uint64_t one = 1;
ssize_t ret = read(_tfd, &one, sizeof(uint64_t));
if (ret != sizeof(uint64_t)) {
perror("read");
return;
}
}
void TimerFd::setTimerFd(int initSec, int peridocSec) {
struct itimerspec newValue;
newValue.it_value.tv_sec = initSec; // 起始的秒数
newValue.it_value.tv_nsec = 0;
newValue.it_interval.tv_sec = peridocSec; // 周期时间
newValue.it_interval.tv_nsec = 0;
int ret = timerfd_settime(_tfd, 0, &newValue, nullptr);
if (ret) {
perror("timerfd_settime");
return;
}
}