一、图的相关概念
1.1 图的定义和术语
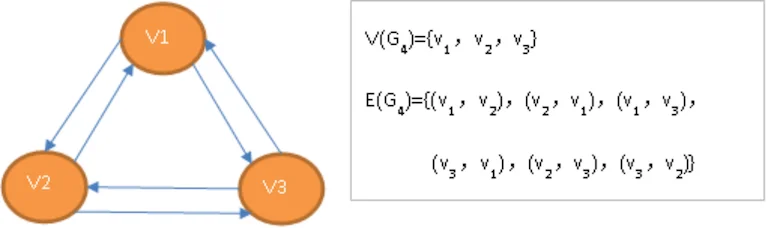
图的定义:图是由顶点的有穷非空集合和顶点之间的边的集合组成,通常表示为:G = (V,E),其中,G表示一个图,V是图G中顶点的集合,E是图G中边的集合。
无向边:若顶点V_(i )到V_(j )的边没有方向,则称这条边为无向边,用无序偶对
(V_(i ,)V_(j))来表示。
有向边:若从顶点Vi 到V_(j)的边有方向,则称这条边为有向边,也称为弧(Arc)。用有序偶对<V_(i ,)V_(j)>来表示。V_(i)称为弧尾(Tail)或初始点,V_(j)称为弧头(Head)或终端点。
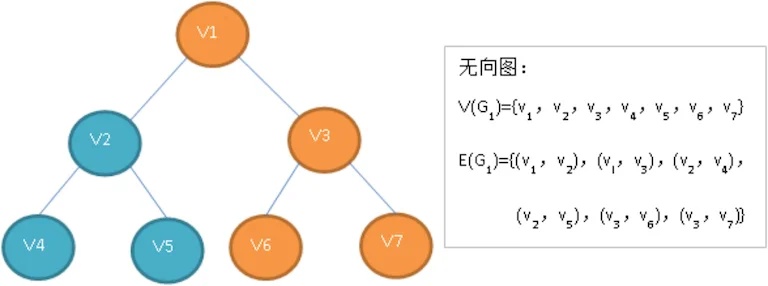
无向图: 如果图中任意两个顶点之间的边都是无向边,则称该图为无向图。
图例(G1):
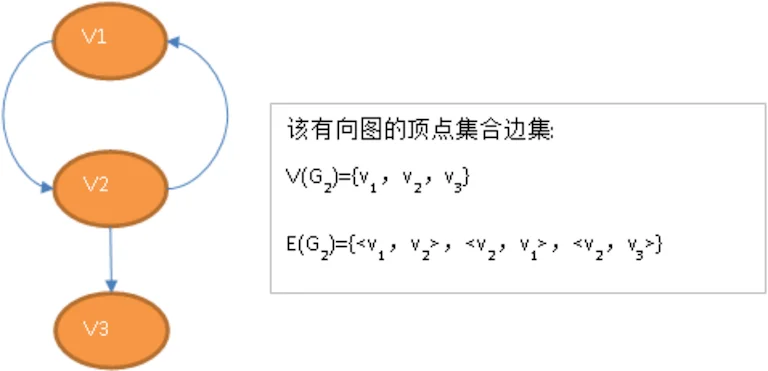
有向图: 如果图中任意顶点之间的边都是有向边,则称该图为有向图。
图例(G2):
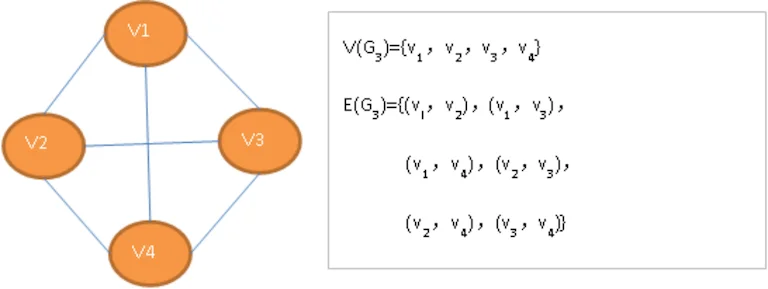
无向完全图:在无向图中,如果任意两个顶点之间都存在边,则称该图为无向完全图。含有n个顶点的无向完全图有n(n-1)/2条边。
图例(G3)
有向完全图:在有向图中,如果任意两个顶点之间都存在方向互为相反的两条弧,则称该图为有向完全图。含有n个顶点的有向完全图有n(n-1)条边。
总结: 图G的顶点数n和边数e的关系
(1)
恰有n(n-1)/2条边的无向图称无向完全图(Undireet-ed Complete Graph)
(2)。
恰有n(n-1)条边的有向图称为有向完全图(Directed Complete Graph)。
注意:
。稀疏图: 有很少条边或弧的图。
稠密图: 有很多条边或弧的图。
权: 有时图的边或弧具有与它相关的数,这种与图的边或弧相关的数叫做权。
网:带权的图通常称为网。
度:顶点的度是指和该顶点关联的边的数目。
入度:有向图中以顶点(v)为头的弧的数目,称为(v)的入度。
出度:有向图中以顶点(v)为尾的弧的数目,称为(v)的出度。
邻接点:对于无向图,同一边上的两个顶点称为邻接点。
子图: 假设两个图G=(V,E)和G1=(V1,E1),如果V1⊆V且E1⊆E则G1为G的子图
路径的长度: 路径上的边或弧的数目。
1.2 连通图相关术语
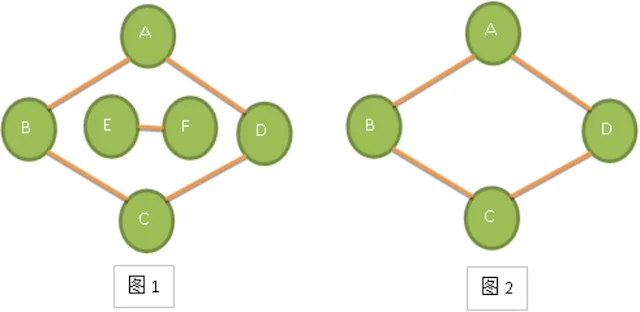
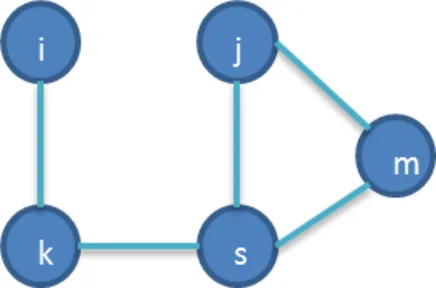
在无向图G=(V,E)中,如果从顶点v到顶点w有路径,则称v和w是相通的。如果对图中任意两个顶点Vi和Vj 属于E,则两个顶点是连通的,则称G是连通图。如下图1,它的顶点A都顶点B、C、D都是连通的,但显然顶点A与顶点E或F就无路径,因此不能算是连通图。而图2,顶点A、B、C、D相互都是连通的,所以它本身是连通图。
1.3 连通图生成树
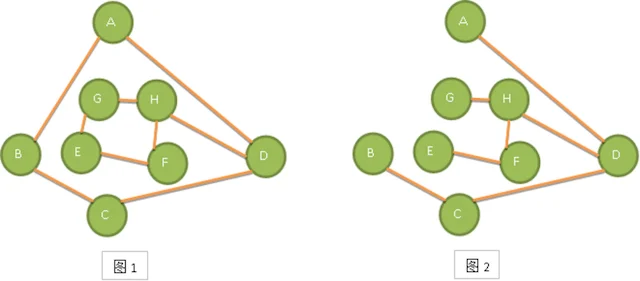
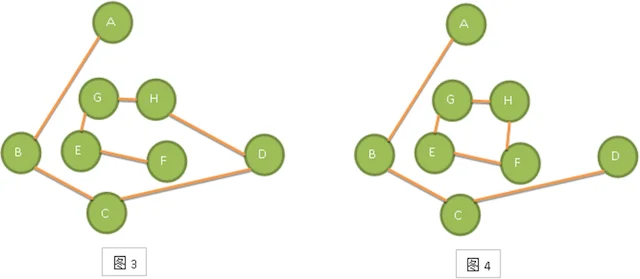
连通图的生成树是一个极小的连通子图,它含有图中全部的n个顶点,但只有足以构成一棵树的n-1条边。
比如下图的图1是一个普通图,但显然它不是生成树,当去掉两条构成环的边后,比如图2或图3,就满足n个顶点n-1条边且连通的定义了。它们都是一棵生成树。从这里也知道,如果一个图有n个顶点和小于n-1条边,则是非连通图,如果它多于n-1条边,必定构成一个环,因为这条边使得它依附的那两个顶点之间有了第二条路径。比如图2和图3,随便加哪两顶点的边都将构成环。不过有n-1条边并不一定是生成树,比如图4。
1.4 总结
图按照有无方向分为无向图和有向图。
- 无向图由顶点和边构成。
- 有向图由顶点和弧构成,弧有弧头和弧尾之分。
图按照边或弧的多少分为稀疏图和稠密图。
如果任意两个顶点之间都存在边叫完全图,有向的叫有向完全图。
与顶点相关联的边的条数叫做度,有向图顶点分为入度和出度。
图上的边或弧带权则称为网。
无向图中连通且n个顶点n-1条边叫生成树。
二、图的存储结构
2.1 邻接矩阵
图的邻接矩阵存储方式是用两个数组来表示图。
一个一维数组存储图中顶点信息,
一个二维数组(邻接矩阵)存储图中的边或弧的信息。
设图G有n个顶点,则邻接矩阵是一个n*n的方阵,定义为:

看一个实例,下图左就是一个无向图。
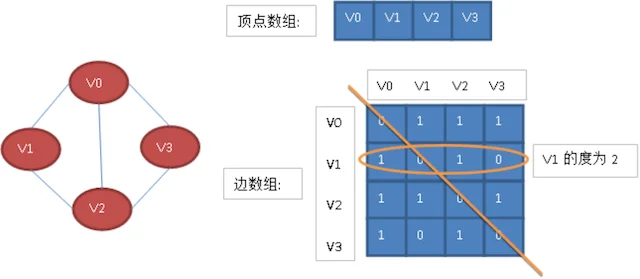
从上面可以看出,无向图的边数组是一个对称矩阵。所谓对称矩阵就是n阶矩阵的元满足a_(ij )= a_(ji)。即从矩阵的左上角到右下角的主对角线为轴,右上角的元和左下角相对应的元全都是相等的。
从这个矩阵中,很容易知道图中的信息。
- 判断任意两顶点是否有边无边;
- 某个顶点的度,其实就是这个顶点vi在邻接矩阵中第i行或(第i列)的元素之和;
- 求顶点vi的所有邻接点就是将矩阵中第i行元素扫描一遍,arc[i][j]为1就是邻接点;
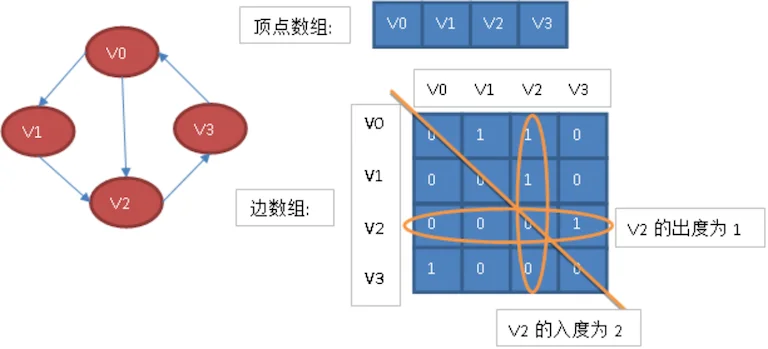
而有向图讲究入度和出度,顶点v2的入度为2,正好是第i列各数之和。顶点v2的出度为1,即第i行的各数之和。
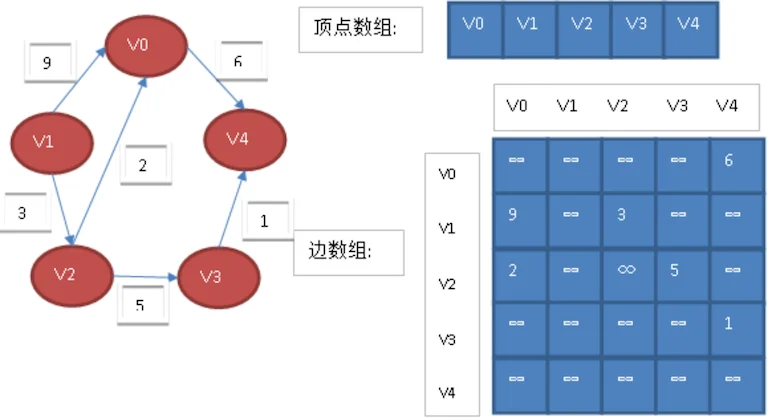
若图G是网图,有n个顶点,则邻接矩阵是一个n*n的方阵,定义为:

这里的wij表示(vi,vj)上的权值。无穷大表示一个计算机允许的、大于所有边上权值的值,也就是一个不可能的极限值。下面左图就是一个有向网图,下图就是它的邻接矩阵。
2.2 邻接表
邻接矩阵是不错的一种图存储结构,但是,对于边数相对顶点较少的图,这种结构存在对存储空间的极大浪费。因此,找到一种数组与链表相结合的存储方法称为邻接表。
邻接表的存储方式是这样的:
图中顶点用一个一维数组存储,当然,顶点也可以用单链表来存储,不过,数组可以较容易的读取顶点的信息,更加方便。
图中每个顶点vi的所有邻接点构成一个线性表,由于邻接点的个数不定,所以,用单链表存储,无向图称为顶点vi的边表,有向图则称为顶点vi作为弧尾的出边表。
数据结构定义:

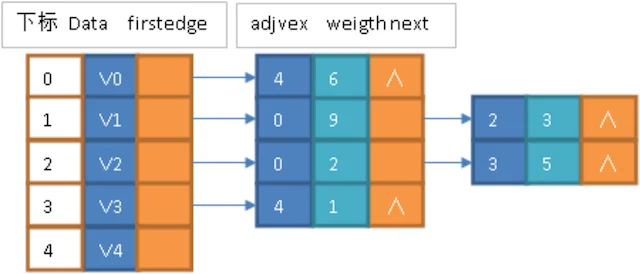
例如,下图就是一个无向图的邻接表的结构。

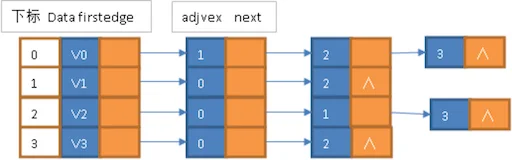
从图中可以看出,顶点表的各个结点由data和firstedge两个域表示,data是数据域,存储顶点的信息,firstedge是指针域,指向边表的第一个结点,即此顶点的第一个邻接点。边表结点由adjvex和next两个域组成。adjvex是邻接点域,存储某顶点的邻接点在顶点表中的下标,next则存储指向边表中下一个结点的指针。
对于带权值的网图,可以在边表结点定义中再增加一个weight的数据域,存储权值信息即可。如下图所示。

三、图的遍历
图的遍历和树的遍历类似,希望从图中某一顶点出发访遍图中其余顶点,且使每一个顶点仅被访问一次,这一过程就叫图的遍历。
对于图的遍历来说,如何避免因回路陷入死循环,就需要科学地设计遍历方案,通常有两种遍历次序方案:深度优先遍历和广度优先遍历。
3.1 深度优先遍历
深度优先遍历,也有称为深度优先搜索,简称DFS。其实,就像是一棵树的前序遍历。
它从图中某个结点v出发,访问此顶点,然后从v的未被访问的邻接点出发深度优先遍历图,直至图中所有和v有路径相通的顶点都被访问到。若图中尚有顶点未被访问,则另选图中一个未曾被访问的顶点作起始点,重复上述过程,直至图中的所有顶点都被访问到为止。
深度优先搜索是通过栈来实现的。
下图中的数字显示了深度优先搜索顶点被访问的顺序
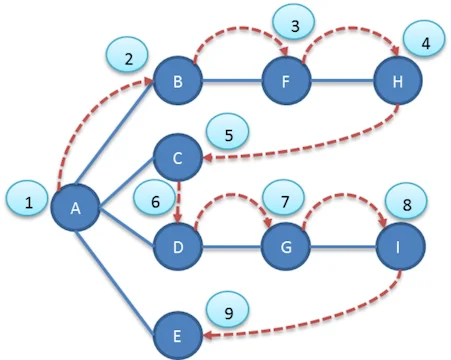
为了实现深度优先搜索,首先选择一个起始顶点并需要遵守三个规则:
如果可能,访问一个邻接的未访问顶点,标记它,并把它放入栈中。
当不能执行规则1时,如果栈不空,就从栈中弹出一个顶点。
如果不能执行规则1和规则2,就完成了整个搜索过程。
3.2 广度优先遍历
广度优先遍历,又称为广度优先搜索,简称BFS。图的广度优先遍历就类似于树的层序遍历了。
在深度优先搜索中,算法表现得好像要尽快地远离起始点似的。相反,在广度优先搜索中,算法好像要尽可能地靠近起始点。。
下面图中的数字显示了广度优先搜索顶点被访问的顺序。
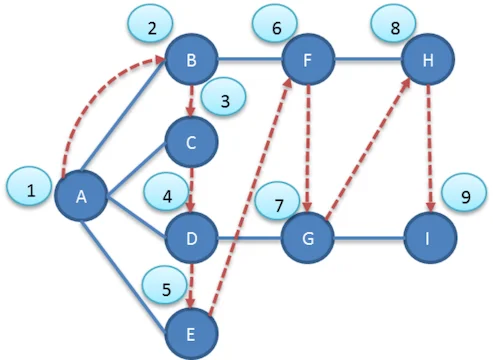
实现广度优先搜索,也要遵守三个规则:
访问下一个未来访问的邻接点,这个顶点必须是当前顶点的邻接点,标记它,并把它插入到队列中。
如果因为已经没有未访问顶点而不能执行规则1时,那么从队列头取一个顶点,并使其成为当前顶点。
如果因为队列为空而不能执行规则2,则搜索结束。
四、最小生成树
- 相关概念
生成树:一个连通图的生成树是它的极小连通子图,在n个顶点的情形下,有n-1条边。生成树是对连通图而言的,是连同图的极小连通子图,包含图中的所有顶点,有且仅有n-1条边。
最小生成树:在图论中,常常将树定义为一个无回路连通图。对于一个带权的无向连通图,其每个生成树所有边上的权值之和可能不同,我们把所有边上权值之和最小的生成树称为图的最小生成树。
- 案例(造价最优问题就是一个最小生成树问题)
铺设煤气管道问题(图形结构)假设要在某个城市的n个居民区之间铺设煤气管道,则在这n个居民区之间只要铺设n-1条管道即可。假设任意两个居民区之间都可以架设管道,管道铺设方案。在众多可选边中,如何选择n-1条边,使总代价最小?这就是求该网络最小生成树问题。
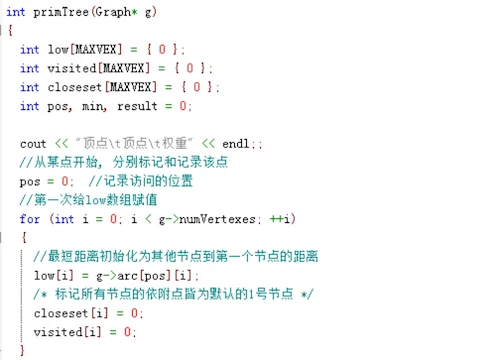
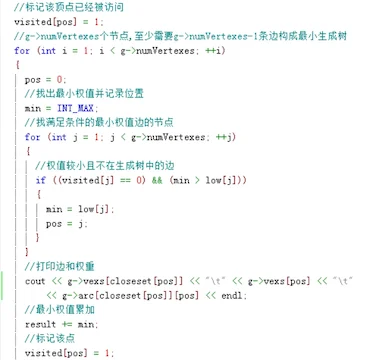
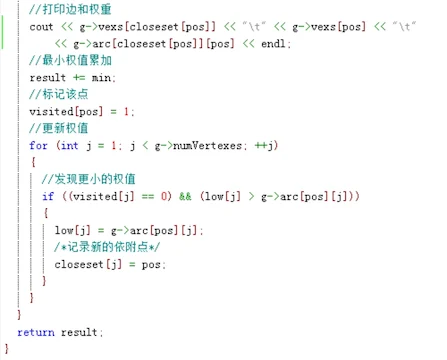
普里姆(Prim)算法
基本思想:设G=(V, E)是具有n个顶点的连通网,T=(U, TE)是G的最小生成树,T的初始状态为U={u0}(u0∈V),TE={},重复执行下述操作:在所有u∈U,v∈V-U的边中找一条代价最小的边(u, v)并入集合TE,同时v并入U,直至U=V。即:
从连通网络 G = { V, E }中的某一顶点 u0 出发,选择与它关联的具有最小权值的边(u0, v),将其顶点加入到生成树的顶点集合U中。
以后每一步从一个顶点在U中,而另一个顶点不在U中的各条边中选择权值最小的边(u, v),把它的顶点加入到集合U中。如此继续下去,直到网络中的所有顶点都加入到生成树顶点集合U中为止。
此时,TE中必有n-1条边,T=(V,TE)为G的最小生成树。
Prim算法的核心:始终保持TE中的边集构成一棵生成树。
- 示例
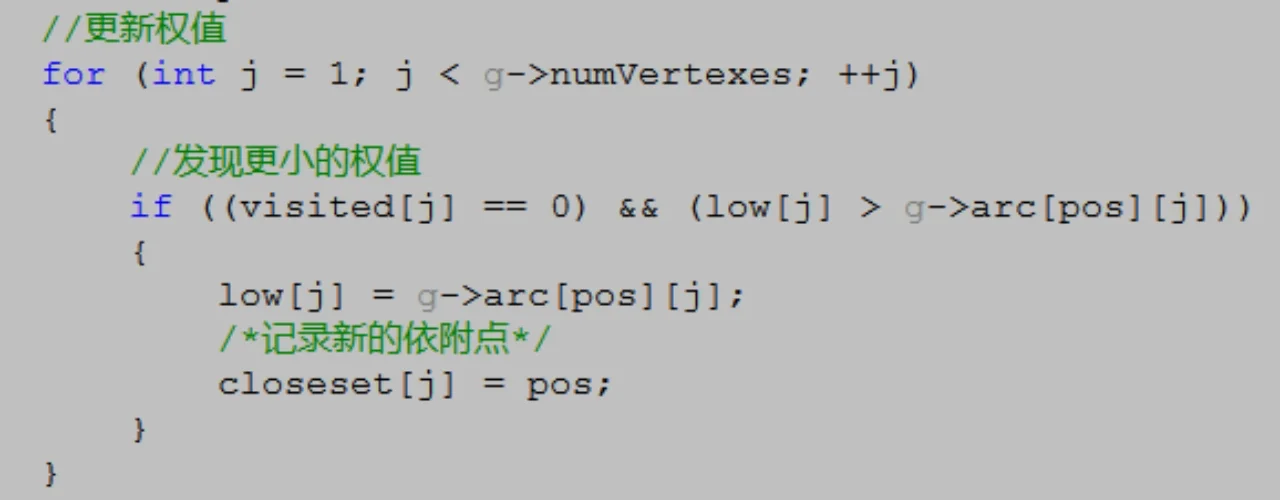
算法实现:
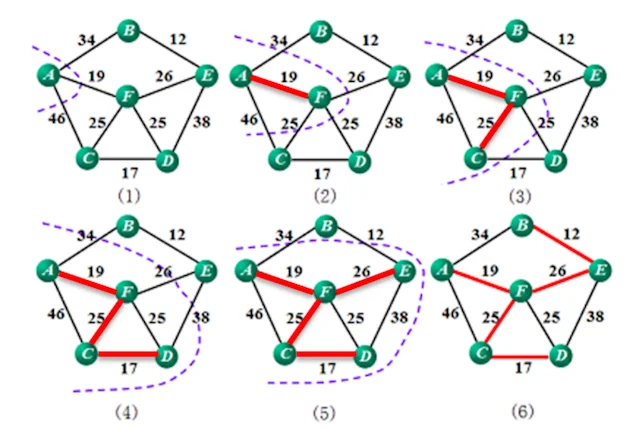
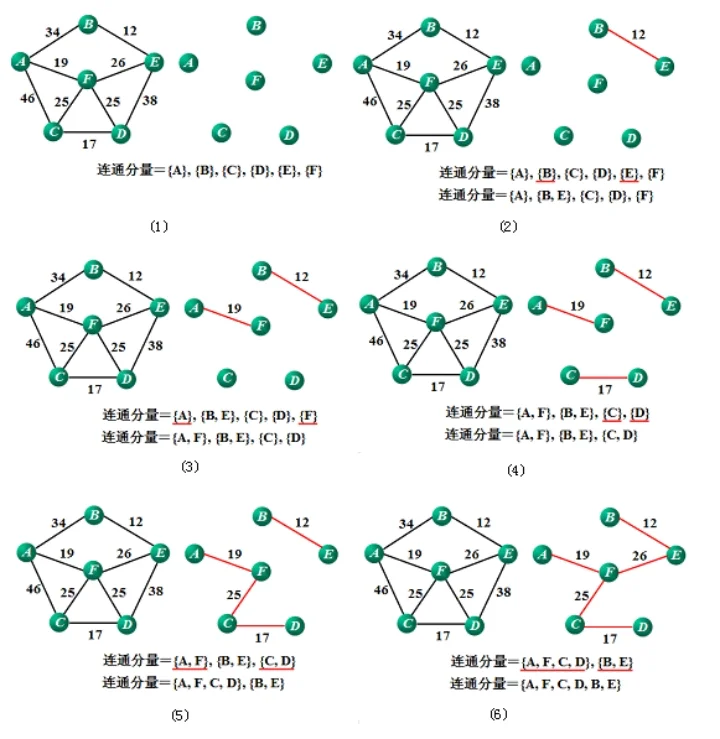
克鲁斯卡尔(Kruskal)算法
基本思想:设无向连通网为G=(V, E),令G的最小生成树为T=(U, TE),其初态为U=V,TE={ },然后,按照边的权值由小到大的顺序,考察G的边集E中的各条边。若被考察的边的两个顶点属于T的两个不同的连通分量,则将此边作为最小生成树的边加入到T中,同时把两个连通分量连接为一个连通分量;若被考察边的两个顶点属于同一个连通分量,则舍去此边,以免造成回路,如此下去,当T中的连通分量个数为1时,此连通分量便为G的一棵最小生成树。
示例
两种算法总结:
prim算法适合稠密图,其时间复杂度为O(n²),其时间复杂度与边得数目无关,而kruskal算法的时间复杂度为O(nlogn)跟边的数目有关,适合稀疏图。
五、最短路径
基本概念
最短路径:从图中某一顶点(源点)到达另一顶点(终点)找到一条路径,沿此路径上各边的权值总和(称为路径长度)达到最小。
单源最短路径:已知有向带权图(简称有向网)G=(V,E),找出从某个源点s∈V到V中其余各顶点的最短路径。
习惯上称路径开始顶点为源点,路径的最后一个顶点为终点。
最短路径的最优子结构性质
该性质描述为:如果P(i,j)={Vi....Vk..Vs...Vj}是从顶点i到j的最短路径,k和s是这条路径上的一个中间顶点,那么P(k,s)必定是从k到s的最短路径。下面证明该性质的正确性。
假设P(i,j)={Vi....Vk..Vs...Vj}是从顶点i到j的最短路径,则有P(i,j)=P(i,k)+P(k,s)+P(s,j)。而P(k,s)不是从k到s的最短距离,那么必定存在另一条从k到s的最短路径P'(k,s),那么P'(i,j)=P(i,k)+P'(k,s)+P(s,j)<P(i,j)。则与P(i,j)是从i到j的最短路径相矛盾。因此该性质得证。(如图)
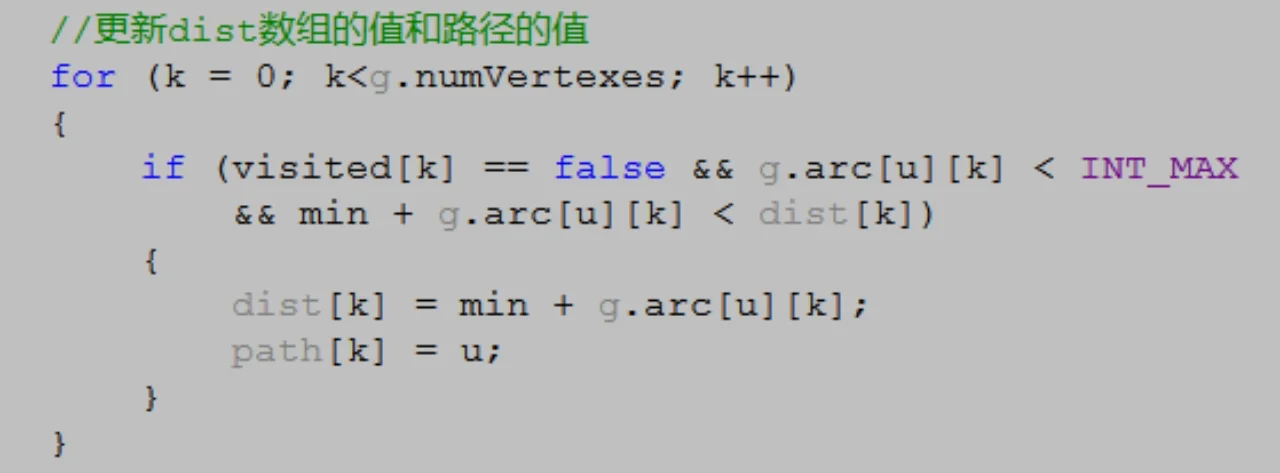
- 迪杰斯特拉(Dijkstra)算法
由上述性质可知,如果存在一条从i到j的最短路径(Vi.....Vk,Vj),Vk是Vj前面的一顶点。那么(Vi...Vk)也必定是从i到k的最短路径。为了求出最短路径,Dijkstra就提出了以最短路径长度递增,逐次生成最短路径的算法。譬如对于源顶点V0,首先选择其直接相邻的顶点中长度最短的顶点Vi,那么当前已知可得从V0到达Vj顶点的最短距离dist[j]=min{dist[j],dist[i]+matrix[i][j]}。根据这种思路,假设存在G=<V,E>,源顶点为V0,U={V0},dist[i]记录V0到i的最短距离,path[i]记录从V0到i路径上的i前面的一个顶点。
从V-U中选择使dist[i]值最小的顶点i,将i加入到U中;
更新与i直接相邻顶点的dist值。
(dist[j]=min{dist[j],dist[i]+matrix[i][j]})
- 直到U=V,停止。
- 案例
交通网络可以画成带权的图,图中顶点表示城市,边代表城市间的公路,边上的权表示公路的长度。对于这样的交通网络常常提出这样的问题:两地之间是否有公路可通?在有几条路可通的情况下,哪一条路最短?以上提出的问题就是在带权图中求最短路径问题,此时路径的长度不是路径上边的数目,而是路径上的边所带权值的总和。
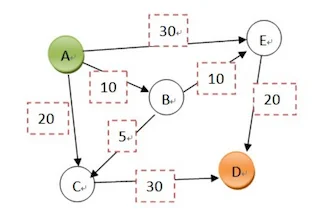
在下面图中找出 A 城到 D 城最近的一条公路。
本次用于分析的拓扑图如下:(A为起点,D为终点,边上的数字为权值)
六、Prim算法和Dijkstra算法的异同
主要有以下几点:
- 1
Prim是计算最小生成树的算法,比如为N个村庄修路,怎么修花销最少。
Dijkstra是计算最短路径的算法,比如从a村庄走到其他任意村庄的距离。
- 2
Prim算法中有一个统计总len的变量,每次都要把到下一点的距离加到len中;
Dijkstra算法中却没有,只需要把到下一点的距离加到cls数组中即可;
- 3
Prim算法的更新操作更新的low是已访问集合到未访问集合中各点的距离;
Dijkstra算法的更新操作更新的dist是源点到未访问集合中各点的距离,已经访问过的相当于已经找到源点到它的最短距离了;